飞行控制系统中的电传操纵技术(Fly-by-Wire, FBW)通过电子化控制与智能化算法,显著提升了航天器的机动性能。其核心在于以电信号替代传统机械传动,结合传感器、计算机和执行器的闭环控制,实现了高精度、快速响应的动态调整。以下是具体机制和影响的综合分析:
1. 高精度控制与快速响应
电传系统通过传感器(如陀螺仪、加速度计)实时采集航天器姿态、角速度等参数,并利用飞行控制计算机进行快速运算和反馈调节。这种电子化的闭环控制避免了机械系统的摩擦、间隙和滞后问题。例如,在姿态调整中,电传系统可通过微型电动执行器(如襟翼、推力矢量喷管)实现微牛级至毫牛级的精准推力输出,显著缩短机动响应时间。
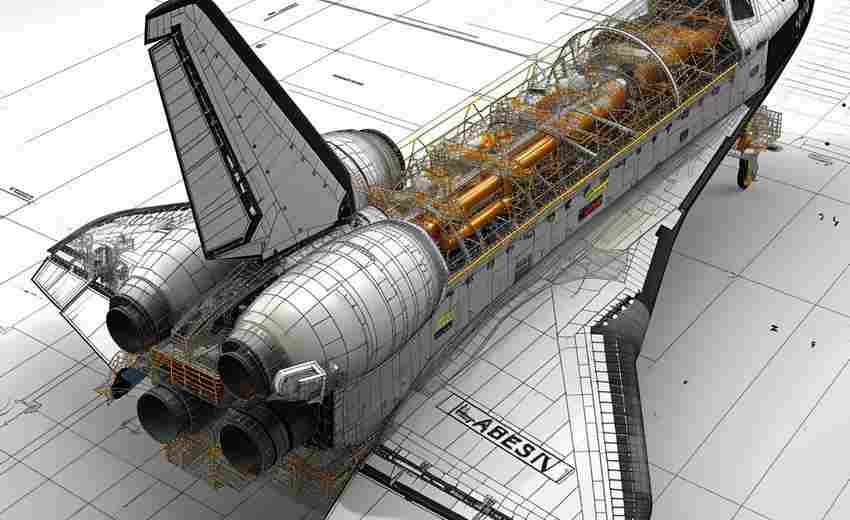
应用实例:SpaceX星舰采用电动推力矢量控制系统(TVC),通过电传操纵精确控制火箭发动机喷管方向,替代了传统液压系统,提升了轨道调整的效率和可靠性。
2. 余度设计与可靠性提升
电传系统通过多通道冗余(如四余度或三余度设计)确保高可靠性。例如,飞行控制计算机和传感器组同时运行多套独立系统,通过余度管理算法筛选并输出最优信号,避免单点故障导致失控。这种设计在极端环境(如高振动、强电磁干扰)下尤为重要,保障了航天器在复杂机动中的稳定性。
技术突破:现代航天器采用非相似余度备份(如数字主系统+模拟备份),进一步降低共模故障风险。
3. 主动控制技术与敏捷性优化

电传系统为主动控制技术(Active Control Technology, ACT)提供了硬件基础,通过动态调整控制律优化机动性能:
案例:NASA的XTE航天器通过电传系统结合最优控制算法,绕轴机动时间缩短5%-10%,验证了敏捷性提升的实际效果。
4. 集成化与多系统协同
电传系统作为飞行器管理系统的核心,可与推进、导航、火控等子系统深度集成,实现综合控制:
5. 未来发展方向
电传操纵技术通过电子化、冗余化、智能化的控制架构,不仅提升了航天器的机动精度和响应速度,还通过主动控制算法扩展了机动能力的物理边界。其与新兴技术(如纳米推进、光传系统)的结合,将进一步推动航天器在深空探测、快速响应任务等领域的性能突破。



































推荐文章
广告学概论课程与高考生创意表达能力培养路径
2025-05-15中专专业选择时需考虑哪些因素
2025-02-16语文高考阅读、新高考语文现代文阅读1
2023-12-24高三冲刺阶段怎样运用归因理论调整学习心态
2025-04-24调剂与复读,哪条路更合适
2024-12-26美术基础知识的学习方法是什么
2025-03-04湖滨中学的学术资源如何利用
2025-01-20昆明理工大学2025年哪些王牌专业值得报考
2025-05-14辽宁省内外高校的专业选择有哪些差异
2025-02-17工科热门方向:山东大学控制科学与工程专业2017年优势解析
2025-05-02