1. 核心技术框架
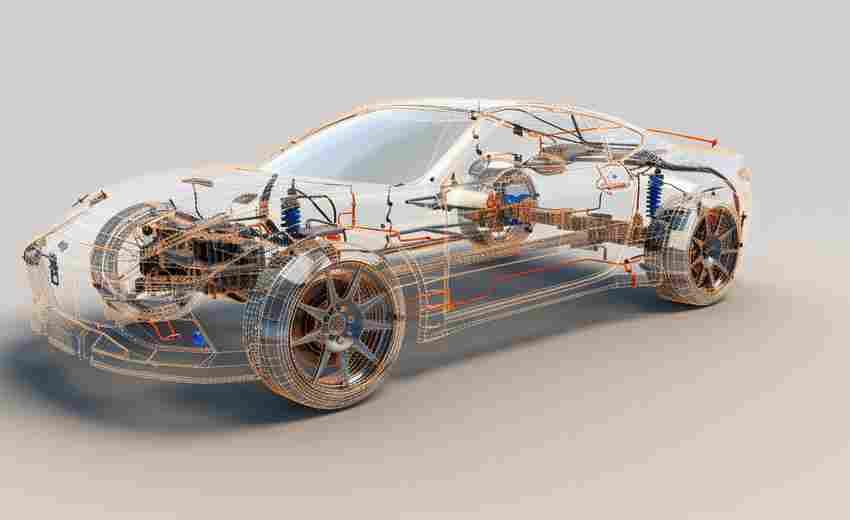
无人驾驶汽车技术主要由感知层、决策层、执行层构成:
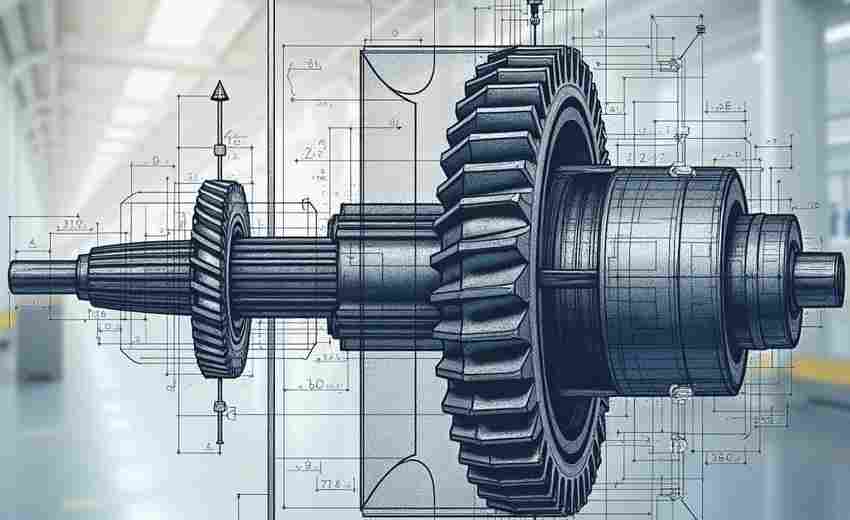
感知层:通过传感器(如摄像头、激光雷达、毫米波雷达、超声波雷达、惯性测量单元等)实时采集环境数据。例如:激光雷达:通过发射激光脉冲生成三维点云,精确测距并构建环境模型(精度达厘米级)。毫米波雷达:利用多普勒效应检测移动物体的速度和距离,抗恶劣天气能力强。摄像头:识别交通标志、车道线及行人,依赖计算机视觉算法处理图像。决策层:结合高精度地图和实时数据,进行路径规划(全局与局部)、行为决策(如变道、避障)和运动控制。执行层:将控制指令转化为油门、刹车、转向等机械操作,实现车辆动态响应。2. 电磁学相关技术原理
电磁兼容性(EMC):无人驾驶系统需避免电磁干扰(EMI)并具备抗干扰能力(EMS)。例如:干扰源:高压电路、高频信号(如雷达)可能成为干扰源。耦合路径:电磁波通过辐射(如天线)或传导(电路)影响敏感设备(如传感器)。解决方案:采用屏蔽技术、滤波电路设计,并遵循EMC标准(如GB 34660-2017)。传感器中的电磁原理:毫米波雷达:基于电磁波反射与多普勒效应,工作频率在24GHz/76GHz波段。激光雷达:利用激光脉冲与目标的电磁波相互作用,计算时间差以确定距离。霍尔效应:用于车辆定位或电流检测,例如监测电机工作状态。二、高考物理电磁学考点分析
1. 核心知识点
无人驾驶技术涉及的电磁学考点主要包括:
磁场对电流的作用:安培力:公式 ( F = BIL sinθ ),分析电机或电磁制动系统中的受力。洛伦兹力:带电粒子在磁场中的运动轨迹(如霍尔传感器原理)。电磁感应:法拉第定律:计算感应电动势(如再生制动中能量回收)。楞次定律:判断感应电流方向(如传感器信号处理)。电路与能量转换:焦耳热计算:分析制动系统中电能转化为热能的过程。功率与效率:如动力回馈模式下电能储存效率(90%)。2. 典型高考题型
综合应用题:例题1:计算无人驾驶汽车在电磁场中的加速度。如:已知磁场强度 ( B )、导体棒长度 ( L )、电流 ( I ),求安培力驱动的加速度。
例题2:分析电磁制动中的能量转化。如:车辆减速时动能转化为电能的效率,结合法拉第定律和焦耳定律计算。
实验设计题:电磁兼容性测试:设计实验验证传感器抗干扰能力,需描述测试原理(如雷达目标模拟器)及数据采集方法。霍尔效应应用:通过实验测定车辆速度或电机电流,推导霍尔电压与磁场关系。3. 高考命题趋势
近年高考物理注重科技与生活结合,无人驾驶可能作为复杂情境题出现:
跨学科融合:如电磁学与运动学结合,分析智能汽车刹车距离(涉及电磁制动与机械制动的综合计算)。创新题型:以无人驾驶传感器为背景,考查电磁波传播、多普勒效应或电路设计。三、总结与备考建议
1. 技术原理关联考点:重点掌握电磁感应、磁场作用力、电路能量转换等知识点,结合无人驾驶实例理解公式应用。
2. 题型训练:针对综合应用题和实验设计题,强化电磁学与力学结合的解题能力(如动量守恒与电磁制动结合)。
3. 关注热点:高考可能以无人驾驶为情境考查电磁兼容性(EMC)设计或传感器原理,需熟悉相关标准和技术术语。
通过以上分析,考生可将理论知识与实际技术结合,提升复杂情境下的问题解决能力,应对高考中的创新题型。


























推荐文章
高考作文如何用李白素材诠释文化自信与家国情怀
2025-07-23不同省份艺术类统考分数线差异大的原因是什么
2025-05-09美术专业:艺术创作的灵感来源有哪些
2025-03-05高考志愿填报:成绩排名与院校录取线如何匹配
2025-03-30高考特殊教育加分政策近年有哪些调整
2025-04-28哪些性格特质的学生更适合报考科研类专业
2025-07-10生物工程的主要研究领域是什么
2025-02-25舞蹈艺术生需要参加哪些面试
2025-02-08数据分析专业毕业生在金融行业的就业方向有哪些
2025-04-01浙江公费师范生提前批报考政策与就业协议解读
2025-04-25